说实话,伺服电机这东西,我玩了快二十年了。从最早的直流伺服到现在的交流同步,从几百瓦的小玩意到几十千瓦的大家伙,我见过太多工程师在选型上栽跟头——包括我自己。有一次,给一台高速贴片机选伺服,我拍脑袋定了个功率,结果调试时电机烫得能煎鸡蛋,差点把产线烧了。那种懊恼,唉…… 所以今天不是来讲教科书理论的,纯粹是把自己和同行们流过的血、走过的弯路,揉碎了跟你聊聊。
功率选择:不是越大越好,真的吗?
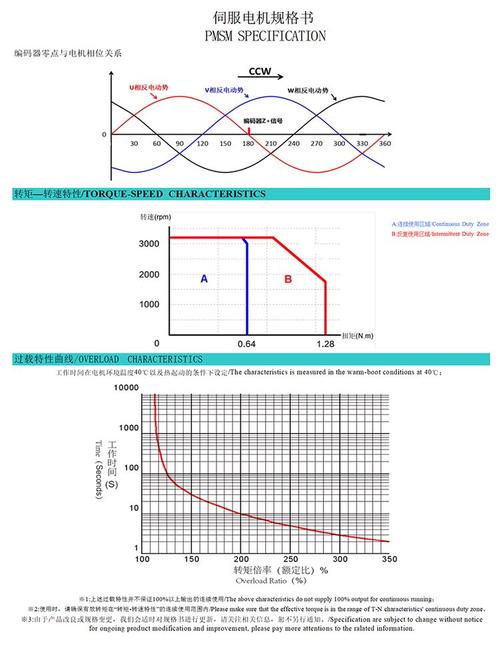
很多人有个直觉:选电机,功率留点余量总没错。错!大错特错!伺服电机跟普通异步电机可不一样,它讲究的是一个“匹配”。功率选太大了,首先惯量就上去了,响应变慢;其次驱动器那块,为了驱动这个大块头,你得换更高功率的模块,成本翻番。更重要的是,伺服系统通常是闭环控制,功率过剩会让系统增益调整变得异常困难——你调PID调到手软,它还是要么震荡、要么迟钝。我曾经给一个数控转塔冲床选过一台3kW的,其实2kW就够,结果呢?冲压频率始终上不去,最后拆了重来,耽误工期不说,被老板骂得狗血淋头。✅ 所以,正确做法是根据负载转矩和转速精确计算,考虑到加减速时的峰值转矩,让电机的转矩-转速曲线把工作区域包络进去,而不是傻大黑粗地往上加。
问:伺服电机功率选小了会直接烧毁吗?
答:不一定立刻烧,但会频繁报警。驱动器一般有过载保护,如果你选小了,稍微一加速就过流,驱动器直接报ALM停机。更阴险的是,长期在接近最大转矩状态下工作,电机温升超高,绝缘老化加速,寿命大打折扣。有时候你发现设备用个一年半载就出问题,查来查去就是当初选型太抠门。我见过最离谱的,为了省几百块钱,让电机长期在150%过载下跑,最后磁钢退磁,整个电机报废,得不偿失啊。
惯量匹配:被忽视的杀手
问:惯量匹配到底多重要?有些老法师说不用管?
答:千万别信那一套!尤其是高动态应用,比如机械手、激光切割机,惯量比不合适就是一场灾难。简单说,负载惯量与电机转子惯量的比值,直接影响系统的稳定性和可控性。比值太大,电机就拉不动负载,表现就是晃动、超调、定位整定时间超长。一般建议惯量比在10:1以内,高性能应用甚至要到3:1以下。早年我搞一台六轴焊接机器人,J5轴老是在转角处抖动,调增益调到怀疑人生,最后发现是手腕惯量比太大了,后来加了个减速机,立刻神清气爽。❗ 所以别犯懒,建个模型算一下,实在不行,实测一下负载惯量,有专门的仪器,或者用伺服驱动器的自整定功能也能估个大概。不过话说回来,有些场景,比如恒速传送带,惯量比可以放宽,因为动态要求不高,但那就另说了。
编码器与反馈:精度从哪来
伺服电机的灵魂是什么?编码器。没有它,就是瞎子。现在市面上主流的是光学增量式编码器和绝对值编码器。增量式的便宜,但断电后位置丢失,每次上电要回零;绝对值的,尤其是多圈绝对值,断电也能记住位置,上电就知道自己在哪,这在一些不能回零的场合(比如升降设备)简直是救命。我记得有次改造一个旧产线,用增量式,每次急停再启动,都要重新找原点,操作工烦死了,后来全换成了绝对值,世界清净了。不过绝对值贵啊,而且通信协议要匹配,比如有的支持BISS,有的只认EnDat,选型时要跟驱动器一起看。还有分辨率,不是越高越好,太高的分辨率对机械振动敏感,容易产生噪声。💡 一个经验:编码器线数选到能满足你定位精度的5-10倍就足够了,再多就是浪费钱还添乱。
最近这些年,无线编码器、无电池多圈绝对值也冒出来了,利用韦根传感器啥的,免维护,挺有意思。在一些极端环境,比如油污、高振动场合,传统的玻璃码盘容易失效,金属码盘或磁编码器更扛造。这些东西,你不在一线摸爬滚打,光看样本是体会不到的。
环境与散热:不可忽略的现实
我见过最蠢的设计之一,就是把一台IP54的伺服电机直接扔在水帘旁边,没半年,轴承锈死。选型时,你必须在脑海里模拟它工作的真实环境:温度、湿度、粉尘、油雾、振动、海拔…… 电机样本上的数据都是在理想环境下的,实际呢?比如在注塑机旁边,温度一高,电机出力就得降额,你不降,它就热保护。海拔超过1000米,空气稀薄,散热变差,也要降额。还有,有些电机带刹车,刹车线圈的工作电压、动作频率都要确认,否则关键时刻刹不住,那是要出人命的。🔧 我的习惯是,把环境因素列表打分,然后跟供应商的FAE一条条过,别嫌麻烦,总比现场出了问题再补救强。
最后唠叨一句:选型这事儿,没有万能公式,都是权衡。成本、性能、可靠性,三者你只能挑两个,对吧?看完这篇,如果你还闭着眼选伺服,那算我白说。
免责声明:文章内容来自互联网,本站仅作为分享,不对其真实性负责,如有侵权等情况,请与本站联系删除。
转载请注明出处:伺服电机选型:避开那些让你踩坑的误区 https://www.dachanpin.com/a/tg/57649.html