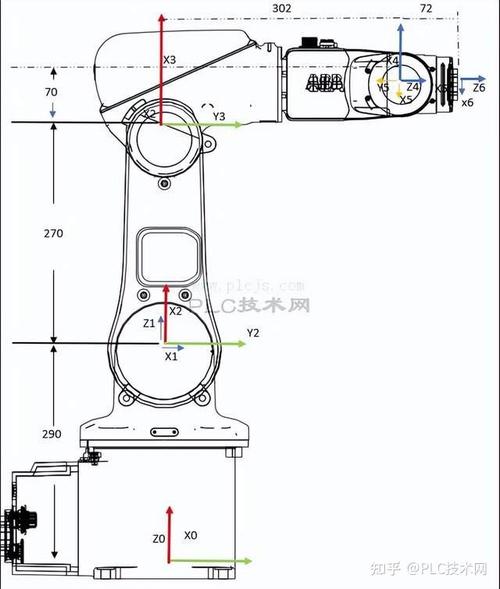
上个月去一家汽配厂,厂长拉着我吐槽——新上的六轴搬运机器人,示教的时候轨迹明明完美,量产三个月后,居然把零件怼到了夹具边上。偏差不到半毫米,但足以让整条线停摆。他一脸不解:“这玩意儿才用了两千小时,怎么就不准了?”
我当场没忍住笑。不是笑他,是笑这个行业里一种心照不宣的傲慢——总觉得工业机器人是铁疙瘩,买来就能干到报废。说实话,精度衰减这事儿,比你想象的来得更快,也更隐蔽。
你以为的“绝对可靠”,其实是出厂假象
工业机器人的重复定位精度,出厂时标得漂漂亮亮,什么±0.02mm、±0.06mm。但那是在恒温恒湿、零负载、低速单轴运动下测出来的。到了现场呢?温度波动、末端负载变化、甚至地基微震,都会让实际轨迹变形。更恶心的是——某些厂商故意模糊“双向可重复性”和“单向重复性”的概念。你拿到的参数,可能只是单向的。嘘……这话我可没当众说过。
关节背隙、减速机磨损、连杆热伸长——这三个元凶,几乎没人会在验收时逐一排查。尤其是国产化的RV减速机,刚性强了,但跑合初期磨屑多,一千小时后传动误差可能翻倍。有些集成商为了中标,配的减速机寿命系数卡得死死的,根本没给你留余量。
精度丢了,别急着叫售后。先干三件事
遇到过最离谱的一次:某家电企业,机器人抓取玻璃面板总出裂痕,他们居然花了两个月找原因,最后发现是末端夹具的定位销被撞弯了0.3度。这个案例让我警觉——出问题先别怀疑机器人本体,外围工装和程序逻辑往往才是背锅侠。
快速排查路线我常用,分享出来:
- ✅ 第一步:用百分表或激光位移传感器,在法兰盘处直接打表,空载跑固定循环。如果重复性仍在标称范围内,说明本体没毛病,赶紧去查夹具、查工件一致性。
- ✅ 第二步:检查关节温度。连续运行两小时后,摸一下各轴电机后盖,温升异常的那个关节,减速机润滑可能已经失效。
- 💡 第三步:导出机器人内部“精度寿命”数据。现在主流控制器都记录各轴累计转动圈数和额定扭矩时数,超过某个阈值就会悄悄降速补偿——可惜90%的用户压根不知道这个功能在哪。
问:我们自己修精度的话,激光跟踪仪太贵了,有没有低成本标定手段?
答:有,但得有手艺。一种土办法是用球杆仪,做圆周测试,然后手动修调DH参数。二手球杆仪一万多块能淘到,准头看操作员经验。还有一种更野的路子——找一块高精度平板,用机器人夹持电感测头走阵列点,反向推算几何误差。这种方法我们在一家减速机厂试过,把绝对定位误差压到了0.1mm以下。不过得提醒一句:没有运动学基础的人别瞎调,会直接把机器人搞成“乱码”。

预防比维修便宜十倍,但很少人当回事
我特别反感那种“坏了再修”的思维。工业机器人不像汽车,定期保养能换机油;它的保养更多是系统性状态监测。现在某些高端系统已经能实时采集关节振动和电机电流波形,通过机器学习预测退化趋势。但中小企业哪儿来的预算?说到底,还是意识问题。
问:那中小企业该怎么办?总不能天天测精度吧。
答:我的建议是建立简易周期检测表。比如每周用千分表在固定位置打一次重复性,每月跑一次全行程轨迹并比对原始程序。数据记下来,一旦发现连续三次测量值呈系统性偏移,就触发校准。至于工具,不一定非得买几十万的设备。某宝上几百块的无线加速度传感器,粘在减速机外壳上,照样能捕捉到早期磨损信号。别小看这些土办法,我们给一家压铸厂做过两年跟踪,成功预警了三次关节卡滞,避免了停线损失。
说到底,工业机器人精度问题不是技术瓶颈,是管理惯性下的盲区。设备部门只管能转就行,工艺部门只管参数不变——而中间的灰色地带,恰恰是精度溜走的地方。下次再看到轨迹飘了,少骂两句供应商,先打开控制柜看看历史报警,或者蹲下来听听减速机有没有“咔嗒”的异响。说不定,问题比你想象的简单得多。
哦对了,最后补一嘴:有一种最近挺火的“协作机器人精度维持方案”,就是靠关节力矩传感器实时补偿形变。效果确实可以,但那个传感器本身五年后漂移量惊人。圈内几个朋友都在赌这个方案三年后会爆雷。先别急着跟风——好吧,我又多嘴了。
免责声明:文章内容来自互联网,本站仅作为分享,不对其真实性负责,如有侵权等情况,请与本站联系删除。
转载请注明出处:工业机器人精度衰减:不是设备老了,是你从一开始就忽略了这事儿 https://www.dachanpin.com/a/tg/54619.html