刚入行那会儿,师傅扔给我一台伺服电机,让我去给一台包装机升级。我心想,简单啊,选个大功率的准没错。结果——机器抖得像筛糠,定位误差能跑出二里地。那一刻我才明白,伺服电机这玩意儿,学问深了去了。今天把这些年踩过的坑、积累的经验掰开揉碎了说给你听,能救一个是一个。
功率不是越大越好,惯量匹配才是灵魂
新手最爱犯的错:电机功率往大了选,感觉余量足才安心。但是!伺服系统讲究的是惯量匹配。电机转子和负载惯量比要控制在合理范围,一般推荐10:1以内,高动态响应场合甚至要求3:1以下。你弄个大功率电机,转子惯量也大,负载却轻飘飘的,结果就是调整增益时进退两难——调高了啸叫,调低了响应慢。
记得有次我做一台高精度贴片机,最初选了台1.5kW电机,惯量比达到了20:1,机器一开机就“唱歌”,共振得整个车间都听见了。后来换成小一号的,加了减速机,惯量比降到5:1,世界立刻安静了。你说这不就是花钱买教训嘛。
问:怎么快速估算负载惯量?
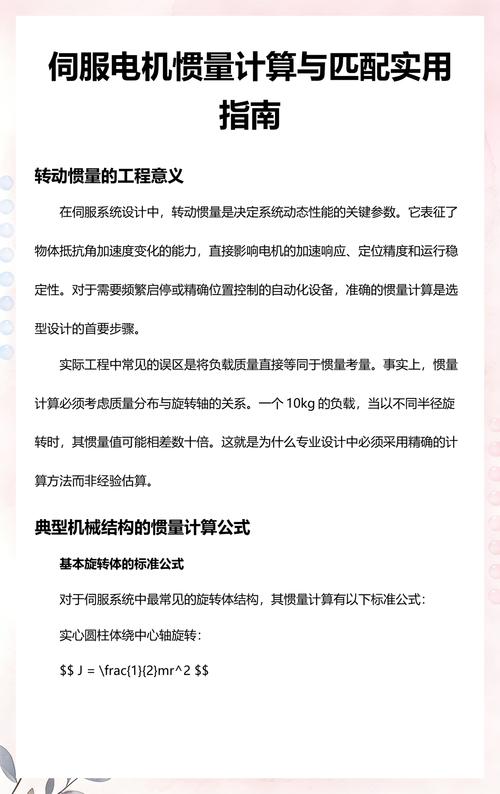
答:如果是常见的丝杠传动,J_load = m * (L / 2π)² 加上丝杠本身的惯量,m是负载质量,L是丝杠导程。圆盘类就是1/8 * m * D²。这些公式网上一搜一大把,但关键是要实测。别完全信理论,因为机构还有摩擦、预压等非线性因素。我一般会在solidworks里把机械结构画出来,软件自动算惯量,再留15%的余量。
编码器分辨率陷阱:别被参数表忽悠了
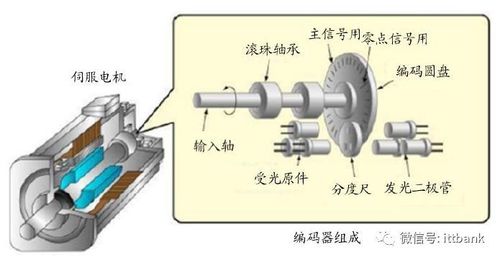
选伺服时,销售说:“我们编码器分辨率23位!”听起来很牛对吧?但这里面有坑。其实有效分辨率要看系统实际能达到的精度,受限于机械传动误差、电机齿槽转矩波动等等。你即使装了个天文望远镜级别的编码器,机械结构软趴趴,最终定位精度也上不去。
更可气的是,有些厂商标注的是细分数后的等效分辨率,而不是物理刻线数。某次我用了一台号称17位绝对值编码器的电机,结果发现温漂离谱,室温变化十几度,零点就飘了。后来拆开一看,编码器是磁阻式的,还不是光学式的!气的我当场就想退货。
问:绝对值编码器电池没电了,多圈数据会丢吗?
答:会!这正是我下面要强调的。多圈绝对值编码器靠电池记忆圈数,电池一旦失效或者断电过久,圈数就归零了。所以关键设备一定要定期更换电池,并且要在通电状态下换,不然瞬间丢位置。现在有些新型的无电池多圈编码器,靠韦根传感器或者能量回收技术,不需要电池也能记录圈数,强烈推荐!比如SICK的HIPERFACE DSL、多摩川的一些型号,虽然贵点,但省心太多。
调试时那些让人抓狂的细节

伺服调试,增益调整往往是最熬人的。自动增益整定功能现在都有,但是!那个功能只能给个大概,精细调整还得靠人。我遇到过一台垂直轴,自动整定后老是往下掉,查了才知道是重力补偿没做好。垂直轴一定要加到位前馈或恒转矩补偿,不然稳态误差让你怀疑人生。
还有共振抑制。机械共振点可能有好几个,滤波器的Q值、频率要一个一个对。曾经有一次,我用了两个陷波滤波器才把一个高频啸叫干掉。过程痛苦,但搞定后那成就感——值了!
问:增益调整有什么快速方法吗?
答:我的习惯是先把积分时间设到最大,微分关掉,然后慢慢加大比例增益,直到电机开始震荡,再往回退一点。这时候再加入积分,缩短积分时间直到无静差。微分增益最后加,用来抑制过冲。当然,这是基于经典PID的方法,现在很多驱动器支持模型追踪控制、PID+速度加速度前馈,参数更多但效果更好。
电缆与干扰,一个屏蔽没做好够你查三天

伺服电机动力线、编码器线必须用双绞屏蔽电缆,并且要分开走线、良好接地。很多人图省事,把电机线和信号线扎一起,结果编码器数据跳变,伺服莫名其妙报警。我遇到过最奇葩的一次:机器一开,旁边的电动螺丝刀一启动,伺服就误差过大停机。最后发现是工厂电网谐波太大,又没有用电源滤波器。后来加了隔离变压器和滤波器才解决。所以说,EMC问题永远是现场调试的幽灵。
这两年,数字化的驱动技术让很多问题可视化。比如通过驱动器的软件可以看到实时转矩波动、位置偏差,甚至能进行频域分析。但无论如何,基础的东西不能省。配线马虎,再好的伺服也白搭。
最后说两句:伺服电机选型调试,真的不能想当然。功率、惯量、编码器、配线,环环相扣。有时候一个小小的参数设错,就让你加班到凌晨。但一旦系统完美运行起来,那种顺畅感,会让你觉得一切辛苦都值了。希望这些踩过的坑能帮你少走弯路。
免责声明:文章内容来自互联网,本站仅作为分享,不对其真实性负责,如有侵权等情况,请与本站联系删除。
转载请注明出处:伺服电机选型与调试的那些坑,我都帮你踩过了 https://www.dachanpin.com/a/tg/59522.html